
www.przemysl-polska.com
16
'24
Written on Modified on
FAULHABER GROUP
Smukłe moduły przechylno-obrotowe do dużych elementów
Mikronapędy DC wprowadzają dynamikę do systemów przenoszenia.

Miniaturowe napędy i mikronapędy można znaleźć w praktycznie wszystkich obszarach techniki automatyzacji i w szerokiej gamie zastosowań, takich jak technologia medyczna i automatyka laboratoryjna, a także ogólna budowa maszyn i intralogistyka, aż po zastosowania w lotnictwie. We wszystkich obszarach małe systemy napędowe zapewniają optymalne bezpieczeństwo procesu, niezawodność i opłacalność działania rozwiązań z zakresu automatyki. Dotyczy to również zastosowań związanych z przenoszeniem. W smukłych modułach przechylno-obrotowych o wysokim momencie obrotowym napędy te zapewniają precyzyjne przemieszczanie nawet dużych elementów roboczych, zarówno w przypadku szybkich śrubokrętów, jak i automatycznych obrotowych systemów przenoszenia, montażu i testowania.
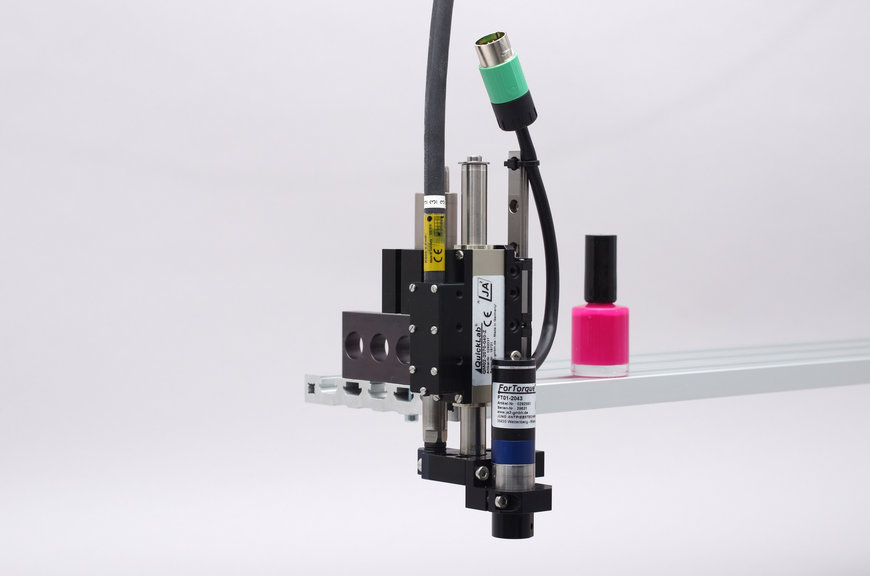
Dla każdego, kto szuka wydajnego i oszczędzającego miejsce rozwiązania dla typowych sekwencji ruchu występujących w technologii przenoszenia i montażu, takich jak obracanie, przechylanie, skręcanie, toczenie lub zwijanie, dostępne są moduły przechylno-obrotowe serii ForTorque firmy JA² (Jung Antriebstechnik u. Automation, patrz informacje o firmie) z siedzibą w Wettenberg w Niemczech, specjalizującej się w kinematyce. Smukłe moduły obrotowe (ilustracja 1) o nieograniczonym zakresie obrotu doskonale sprawdzą się w przypadku dynamicznej rotacji dużych elementów o dużej bezwładności z użyciem chwytaków mimośrodowych oraz w przypadku technologii skręcania i zwijania.
Obracanie, przechylanie, skręcanie, zwijanie
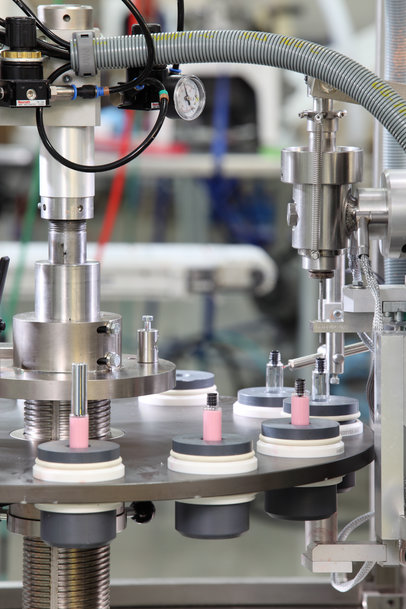
Typowym przypadkiem zastosowania miniaturowych modułów przechylno-obrotowych jest na przykład zakręcanie zakrętek małych pojemników na kosmetyki lub farmaceutyki w ograniczonych przestrzeniach na w pełni zautomatyzowanych liniach pakowania. Moduły mogą być również wykorzystywane do obracania chwytaków lub elementów roboczych, np. podczas montażu lub rozdzielania produktów. Produkty zostały zaprojektowane jako system modułowy. Dostępnych jest sześć rozmiarów o średnicach 16, 20, 25, 35, 40 i 45 mm. Pozwala to na obsługę szczytowych i ciągłych momentów obrotowych wynoszących odpowiednio od 0,3 i 0,14 Nm do 4,0 i 2,6 Nm. Bezwładność obciążenia może wynosić od 2,0 do 200 kg*cm². To najbardziej odpowiednie rozwiązanie umożliwiające precyzyjny ruch i pozycjonowanie pod odpowiednim kątem dla szerokiego zakresu różnych zadań związanych z przenoszeniem i montażem.
Aby zmniejszyć obciążenie wału wyjściowego przekładni w przypadku dużych zewnętrznych momentów bezwładności, płyta wyjściowa czterech większych modeli modułu posiada wyjątkowo sztywne łożysko składające się z dwóch łożysk o cienkim przekroju. Ponadto moduł przechylno-obrotowy o średnicy 40 mm można dodatkowo wyposażyć w złącze obrotowe do systemów pneumatycznych i podciśnieniowych (ilustracja 2), które można wykorzystywać np. do zasilania chwytaka pneumatycznego sprężonym powietrzem. Specjaliści w zakresie kinematyki jeszcze bardziej rozwijają koncepcję modułową, oferując możliwość połączenia szybkich modułów obrotowych z osiami liniowymi, np. z serii QuickLab (ilustracja 3). Dopasowane płyty adaptera dostępne są jako akcesoria. Dzięki temu można stworzyć kompaktowe systemy, od podnosząco-obrotowych lub podnosząco-przechylnych, aż po pięcioosiowe systemy przenoszenia.
Wysoka dynamika i precyzja
„Napędy są sercem naszego modułowego systemu automatyki, a stawiane przed nimi wymagania są bardzo wysokie” – wyjaśnia Wilhelm Jung (ilustracja 4), dyrektor zarządzający JA². „Silniki muszą pracować bardzo dynamicznie, być sterowane w sposób precyzyjny i mieć odpowiednie wymiary”. Na przykład w przypadku modułów ForTorque sprawdziły się bezszczotkowe silniki DC serii B i BX4 firmy FAULHABER (patrz informacje o firmie) (ilustracja 5). Silniki w technologii dwubiegunowej i czterobiegunowej są wyjątkowo kompaktowe. Zastosowane warianty serii B o średnicach 16, 20 i 35 mm mają zaledwie 28, 36 i 68 mm długości, ale w przypadku największego wariantu zapewniają ciągły moment obrotowy do 168 mNm. Podobne parametry oferuje również seria BX4. „Tutaj używamy silników o średnicy 22 mm lub 32 mm zapewniających ciągły moment obrotowy odpowiednio 18 i 53 mNm” – informuje Wilhelm Jung.
Silniki te są stosowane w modelach ForTorque o prędkości do 8000 obr./min. Redukcję przełożenia zapewniają różne przekładnie, w tym przekładnie planetarne z zerowym luzem międzyzębowym firmy FAULHABER. Technologia przekładni wraz z odpowiednią maksymalną prędkością wejściową określa wartość graniczną maksymalnej prędkości silnika. „Następnie wybieramy stopień przełożenia w zależności od zastosowania” – kontynuuje Wilhelm Jung. „W ten sposób możemy wpłynąć na to, do jakiego stopnia zewnętrzny moment bezwładności zostanie zmniejszony o wartość kwadratową przełożenia. Silnik można wówczas precyzyjnie regulować bez wpływu dźwigni. Przy wyborze przekładni szczególną uwagę zwróciliśmy na jej sprawność, ponieważ im lepsza sprawność, tym dokładniej można określić moment obrotowy na wyjściu przekładni na podstawie wartości prądu silnika. Jest to kluczowy parametr, szczególnie w przypadku zastosowań związanych z wkręcaniem, gdy delikatne (plastikowe) części muszą być wkręcane z określonym momentem obrotowym”.
Technologia pojedynczego kabla umożliwia bezproblemową kontrolę
Wszystkie moduły przechylno-obrotowe można łączyć i kontrolować za pomocą standardowego złącza bagnetowego, pojedynczego kabla i kontrolera ruchu. W systemach automatyki szafa sterownicza znajduje się zazwyczaj w pewnej odległości od samego napędu. „Silnik i sterownik znajdujący się w oddzielnej szafie rozdzielczej mogą znajdować się 10, 20 lub więcej metrów od siebie” – mówi Wilhelm Jung. Specjalny, wieloekranowy kabel bez zakłóceń przekazuje moc silnika i sygnał czujnika położenia między silnikiem a sterownikiem na odległość do 30 m. Kabel jest mocowany z zabezpieczeniem przed naprężeniami, można go podłączyć do źródła zasilania i jest również przeznaczony do użytku z łańcuchami kablowymi, tj. do użytku mobilnego. Ponadto dzięki dostępnym wstępnie zmontowanym zestawom kabli instalacja jest bardzo prosta – wystarczy podłączyć jeden kabel.
W przypadku kontrolerów ruchu użytkownik może wybrać odpowiedni dla siebie model, ponieważ zastosowane silniki są kompatybilne z różnymi kontrolerami. „Oferujemy również kontrolery ruchu firmy FAULHABER” – dodaje Wilhelm Jung. Te dwie firmy skutecznie współpracują od wielu lat. W wyżej wymienionych osiach liniowych QuickLab stosowane są np. napędy liniowe DC LM2070 i LM1247 (ilustracja 6). Nie są one konstruowane jako „wirniki powierzchniowe” z podwoziem i prowadnicą. Zamiast tego ruchomy pręt jest ciągniony w 3-fazowym samonośnym uzwojeniu. „Taka konstrukcja zapewnia wyjątkowo dobrą relację między siłą liniową a prądem i wysoką dynamiką. Ponadto nie występuje efekt coggingu, dzięki czemu silniki liniowe idealnie sprawdzą się w naszym modułowym systemie QuickLab” – podsumowuje Wilhelm Jung.
www.faulhaber.com
